操作辅助定位系统
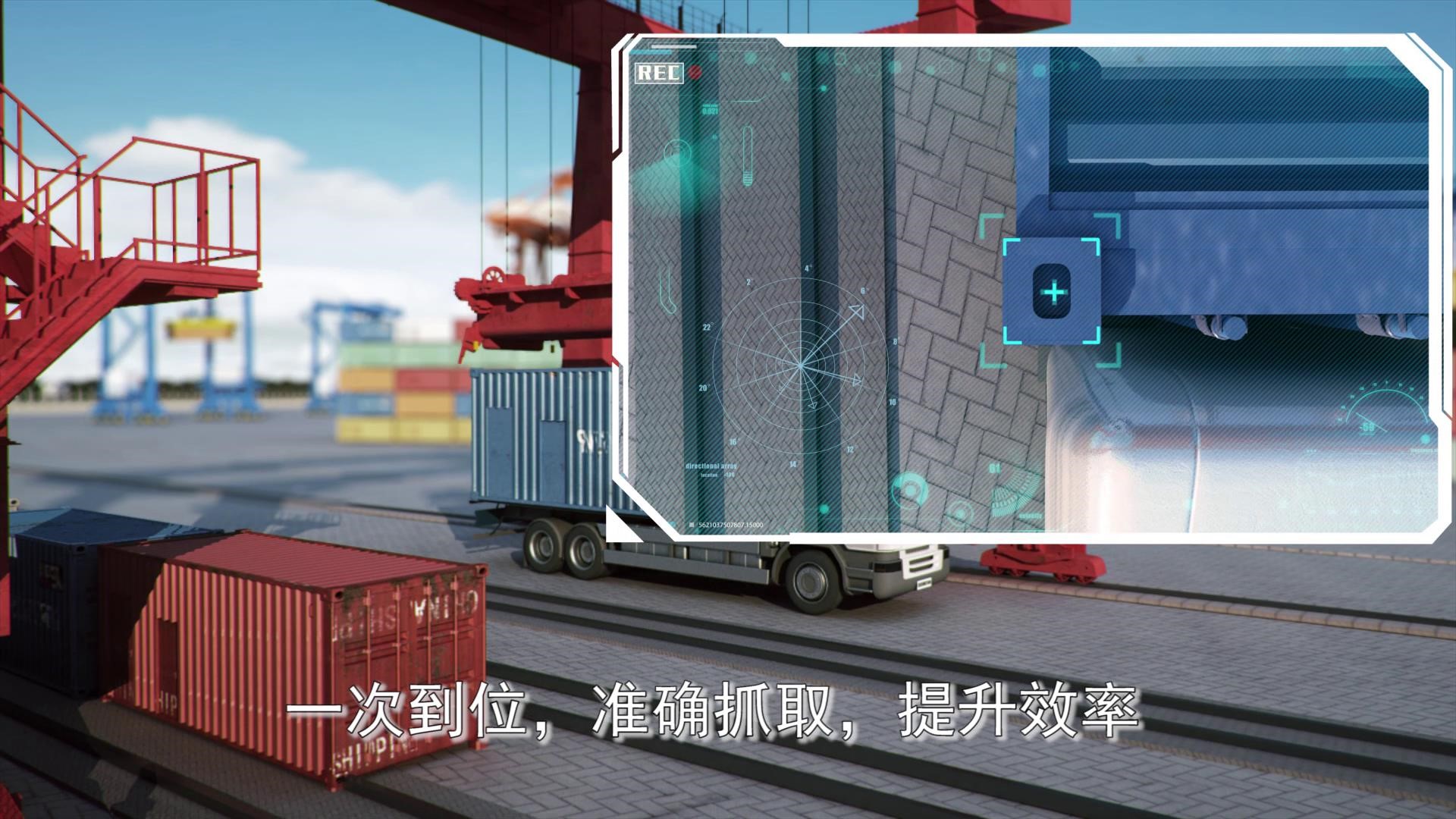
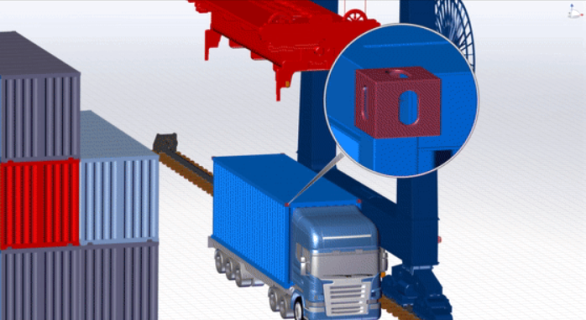
在集装箱操作中,将吊具对准集装箱是最为困难的一项操作,往往需要吊车司机操 作吊具时反复操作。这一难题在远程操作 / 自动操作的起重机械中更为凸显。
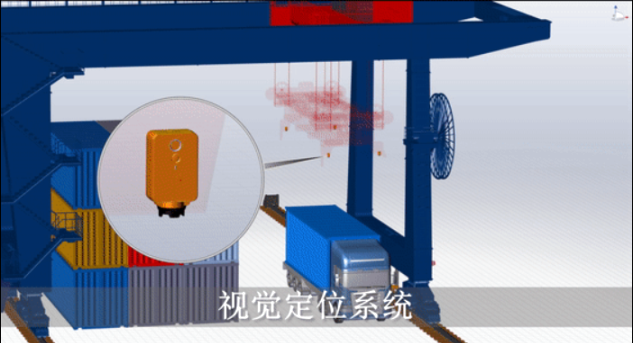
为此我们结合视觉识别技术和防摇系统,设计了此一辅助定位系统,其可以精准定 位并锁定集装箱位置,实现吊具与集装箱的自动抓取,降低人工操作难度,提高集装箱的 装卸效率,实现吊装系统智能化升级改造。